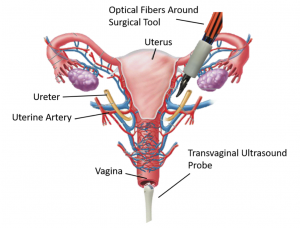
 Approximately 600,000 hysterectomies are performed each year in the US to remove the uterus. This surgery requires cauterization and clipping of the uterine arteries, located close to and overlapping the ureter, which can cause accidental injury to the ureter. We are developing the imaging technology needed visualize the uterine arteries and the nearby ureter, which are both hidden by surrounding tissue. Our goal is to eliminate the risk of accidental ureteral injury during robotic hysterectomies performed with the da Vinci surgical robot. The concept for this intraoperative photoacoustic imaging technology includes optical fibers that surround a da Vinci surgical tool and a transvaginal ultrasound probe placed to receive the resulting sound waves, as demonstrated in the picture:
Approximately 600,000 hysterectomies are performed each year in the US to remove the uterus. This surgery requires cauterization and clipping of the uterine arteries, located close to and overlapping the ureter, which can cause accidental injury to the ureter. We are developing the imaging technology needed visualize the uterine arteries and the nearby ureter, which are both hidden by surrounding tissue. Our goal is to eliminate the risk of accidental ureteral injury during robotic hysterectomies performed with the da Vinci surgical robot. The concept for this intraoperative photoacoustic imaging technology includes optical fibers that surround a da Vinci surgical tool and a transvaginal ultrasound probe placed to receive the resulting sound waves, as demonstrated in the picture: